
前回お話した台形駆動・三角駆動の直線的な加速・減速でなく、曲線的な加速・減速を行うことで
一層スムーズなモーションコントロールが可能です。
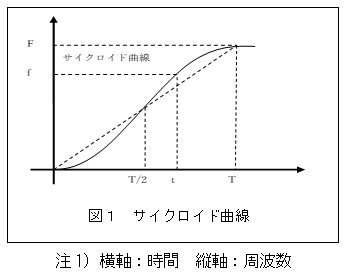
・サイクロイド曲線
サイクロイド曲線は
f:周波数 F:最大周波数
t:経過時間 T:最大周波数に達する時間
式1で演算されます。直線的な加速・
減速に比べスムーズな加速・減速が得られますが、図1のT/2付近での
最大加速度が大きくなります。
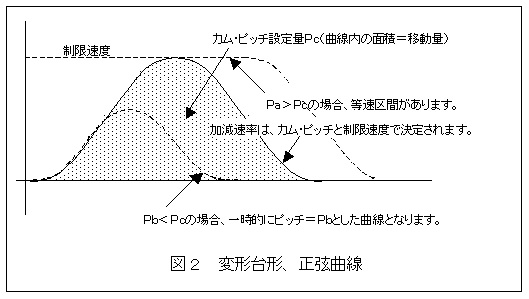
・変形台形曲線、変形正弦曲線サイクロイド曲線に比べ最大加速度が軽減され、非常になめらかな曲線で
広く用いられています。
位置決め量とカム・ピッチ(Pc)が等しい場合には、制限速度まで加速する加速・減速対称のカム曲線が得られます。
位置決め量がカム・ピッチより大きい場合(Pa)、(Pa-Pc)相当の等速区間ができます。位置決め量がカム・ピッチに満たない場合(Pb)、一時的にカム・ピッチ=Pbとした曲線で移動します。この場合の制限速度は最大加速率が(Pc)の場合と等しくなるように決定されます。変形台形、正弦曲線の加減速率はカム・ピッチと制限速度により決まります。*カム・ピッチ(Pc)はパラメータで設定します。
東阪電子の技術情報
弊社では、直線・曲線加減速を含めたモーションコントロールは市販のICチップを使用せず、東阪独自技術で
製品化しています。