
1.ステッピングドライバとは
ステッピングドライバとはステッピングモータを駆動するためのモータドライバです。
ここでは、簡単にステピングモータについて説明しましょう。
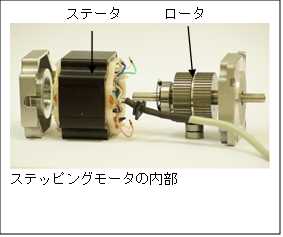
ステッピングモータ(永久磁石PM型と呼ばれているタイプ)は図の様に永久磁石で出来ている、可動部のロータ(Rotor)と電磁石で出来ている固定部のステータ(Stator)から構成されています。(ロータが永久磁石で出来ています)
ステッピングモータには大きく分けて2相モータと5相モータがあり用途に応じて選択し使用します(ちなみに図は2相モータを分解した写真です)。 2相モータより5相モータの方がより滑らかな回転をしますが5相モータは構造が複雑になりコストUPとなります。
ステータの電磁石は複数のコイルから構成されておりそのコイルに一定の法則でコイルに電流を流し(一般的に励磁すると言います)可動部のロータを駆動(回転)させそれに繋がっているシャフトが回転します。 このコイルに一定の法則で電流を流す(励磁)する装置をステッピングモータドライバーと言います。(5相モータには5相用のドライバーが必要で、2相に比べコストUPになります)
2.ステッピングドライバを使う上での注意(長所と短所)
長所として
①モータの回転量(角度)は指令(入力パルス)に比例します。
②一般的に静止状態時最大のトルクが出ます。
③始動・停止に対しての反応(レスポンス)がよいです。
④ステピングモータはオープンループ制御のため制御が容易になりコストメリット大きいです。
⑤ステッピングモータにはブラシなどの接触部分がないため回転するシャフトと本体を固定に使用する軸受部分で寿命がほぼ決まり通常は高寿命です。
⑥回転速度は指令(入力パルス)に比例するので範囲の広い回転速度に対応します。
短所として
①ステッピングモータドライバーの制御が悪いと、モータ回転時に共振による振動が発生する事があります。
⓶高速域での使用は難しい。
③ステッピングモータに電流を流していない状態(モータフリー)でもコギングという独特の負荷が有ります。
以上の長所・短所がありますが例えば
・長所②は逆を言えばステッピングモータやステピングドライバーが発熱しますので、停止時に大きなトルクが必要でないときは停止時に電流を抑える機能(パワーダウン機能)を使用し発熱を抑えて使用します。
・短所①はステピングモータドライバーの制御にもよりますが、ステッピングモータには共振という特有の現象がありますので、共振を避けて使用します。
(入力するパルス列速度の加速・原則時間を調整しこの共振領域を回避して使用します。)
・短所②の高速域は不利です、コストUPになりますが5相のステッピングモータを使用すれば2相ステッピングモータよりは高速域での使用が可能です。
3.ステッピングドライバの特徴
いままで述べたことの繰り返しになりますが
・モータの回転量(角度)は指令(入力パルス)に比例します
=>モーションコントロールを使用します
・始動・停止に対しての反応(レスポンス)がよい
=>急激な始動・停止はステッピングモータ独特の脱調状態になるので注意が必要です
・オープンループ制御のため制御が容易になりコストメリット大きい
・構造的にシンプルなので高寿命、回転部と筐体間のベアリングの寿命で決まります。
・停止時に(最大)トルクを出すことができるので
=>垂直軸など停止時にもトルクが必要な装置に使用できる
ただし、垂直軸の場合電源OFF時に注意が必要です。電源OFF時モータはトルクが発生しませんので重力によってメカが落下します。通常はモータ軸にブレーキを取り付けます、このブレーキは電源OFF時ブレーキが有効(ブレーキが動作する状態)ですのでブレーキを使う時はこの点に注意が必要です。
=>ステピングドライバーの発熱に注意が必要
=>ステッピングモータも同様に発熱に注意が必要
特に高速回転時発熱が顕著に発熱します。 ステピングモータはFANモータの様に常に回転を続けるという動作を行う時はモータの発熱に注意が必要です。一般的にモータ表面温度が100℃を超えない様に使用します。
=>発熱を抑える方法について
・モータ電流を抑える、発熱量は流れる電流(I)の2乗に比例しますので。
電流(I)を1/2にすれば発熱量は1/4になります。
トルクに余裕があれば、モータ電流を減らして発熱を抑えて下さい。
・先程述べましたモータ停止時のパワーダウン機能を使用して停止時間を増やすなど の方法で発熱を抑えて下さい。
・使用方法で発熱を抑える事が出来ない時は強制空冷(FAN等)を行って下さい。
通常の2相ステッピングモータは指令(入力パルス)単位の回転角度は基本角度が1.8°で すがステッピングドライバの制御で半分の0.9°の2つが選択出来ます。
この基本角度を「フルステップ」 基本角度の半分を「ハーフステップ」と呼びます。 (但しメーカ様によっては呼び方が違う場合が有ります) ハーフステップ(0.9°)の方がモータの回転時の振動が少なくなります。
さらにマイクロステップと呼ばれ基本角度(1.8°)の1/100 1/200 等にする方式もあり、より一層振動が抑えられます。
<マイクロステップを使用する際の注意>
ステッピングモータの停止位置の精度がでるのは、基本角度の1.8°で使用しているときで す注意下さい、特にマイクロステップで1/100や1/200のような高分解数で使用した場合 停止位置は基本角度の1/100や1/200にはなりませんので、停止位置精度が必要な場合の マイクロステップ使用の際は停止位置に注意が必要です。マイクロステップを使用する際はステッピングモータの振動抑制やスムースな動きを主目的に使用することが多いです。
4.ステッピングドライバとサーボの違い
ステッピンドライバのオープンループ制御に対してサーボドライバはクローズドループ制御 です。
ステピングドライバーは入力された指令(パルス)信号に応じてモータを回転させています。
これに対して、サーボドライバはモータ軸の回転角度(速度)を検出器(エンコーダ)で検出しサーボドライバへ信号をフィードバックします。 次にサーボドライバに入力される指令(パルス)を常に比較し両者(指令とフィードバック)の差(偏差と呼びます)が0になる様に制御しています。 ですから、停止時のトルクは0です、サーボモータ軸に外部から力(トルク)が加わることでフィードバックの信号が発生し0にしようとします。 常にモータに負荷が加わる様な使い方(例えば垂直軸)には注意が必要です。
ステピングモータに比べて高速回転が出来ます。
ステッピングモータではマイクロステップを使用してもサーボの方が振動はほぼなくスムースな回転を行います。サーボモータやサーボドライバは制御や構造はステッピングモータやステッピングドライバに比べて複雑になるためコストUPになります。
5.弊社のステッピングドライバの実績
当初は創業当初からステッピングドライバの設計・試作・製造(委託製造)・販売を行い各種のステッピングモータに対応できるステッピングドライバやマイクロステップ対応のステステピングドライを取り揃えています。
・2相ステッピングドライバ
・5相ステッピングドライバ
・2相マイクロステップ対応ドライバー
・2相ステッピングドライバ内装モーションコントロール(1軸・多軸対応・通信機能付き)
・低振動対応2相ステッピングドライバ
等代表的な一例があります、お客様の要求仕様に応じた製品開発を試作から行わせさせて頂きます。 お客ささまで開発された製品の委託生産も、お気軽に弊社までお問合せください。